Thuyết hệ thống
Điều khiển học (cybernetics) trong doanh nghiệp hệ thống
1. Khái quát về điều khiển học
Điều khiển học (cybernetics) là khoa học về việc điều khiển, thu thập, truyền và xử lý thông tin, thường bao gồm liên hệ điều chỉnh ngược trong các cơ thể sống, trong máy móc và các tổ chức và các kết hợp của chúng (Ví dụ hệ thống kỹ thuật xã hội, các máy móc do máy tính điểu khiển, chẳng hạn robot).
Từ khi thuật ngữ “điều khiển học” xuất hiện, các nhà khoa học đã tập trung vào những lỗi sai trong hệ thống truyền thông thông tin và kiểm soát phức tạp. Trong điều khiển học, khái niệm về liên lạc và kiểm soát có mối quan hệ mật thiết với nhau. Các thông tin liên quan đến chức năng và kiểm soát được trao đổi giữa các bộ phận của hệ thống cũng như giữa hệ thống với môi trường xung quanh. Mục đích của những thông tin này là đạt được điều kiện cân bằng hay nói cách khác là duy trì được khả năng hoạt động của hệ thống.
Trên thực tế, những hệ thống kiểm soát điều khiển tiêu thụ năng lượng ít hoặc không đáng kể khi vận hành thường cho hiệu quả cao. Điều này xảy ra khi chức năng cơ bản của nó là xử lý thông tin chứ không phải là truyền năng lượng. Việc kiểm soát điều khiển cần phải được phân biệt với sự khuyếc đại của dòng chảy bị tác động, điều này cũng có thể xảy ra khi có sự tồn tại của sự khuyếc đại.
Sự kiểm soát thuộc điều khiển học thường được thực hiện cùng với những phương pháp đo lường hiệu quả. Có ba phương pháp đo lường thường được sử dụng như sau:
- Đo lường hiệu quả chất lượng: là thước mức độ hệ thống đạt được chuyển đổi dự kiến;
- Đo lường hiệu quả sử dụng tài nguyên: thước đo trong phạm vi mà hệ thống đạt được sự chuyển đổi như mong muốn mà chỉ sử dụng nguồn tài nguyên ở mức tối thiểu;
- Hiệu quả công suất/ khả năng thực hiện: đây là thước đo trong phạm vi mà ở đó hệ thống đóng góp vào mục đích của một hệ thống ở mức độ cao hơn mà hệ thống này là một tiểu hệ thống trực thuộc. Điều khiển có thể được định nghĩa là sự tác động có mục đích hướng tới mục tiêu đã được định sẵn liên quan tới việc so sánh liên tục những trạng thái hiện tại với mục đích trong tương lai. Điều khiển là:
- Xử lý thông tin;
- Lên chương trình;
- Quyết định;
- Trao đổi thông tin (đối ứng).
Một chương trình được lập được mã hóa hoặc chuẩn bị trước các thông tin điều khiển quá trình (hay hành vi) dẫn tới một kết quả đã được xác định trước. Nhìn chung, có những mức độ chương trình tiêu chuẩn như sau:
- Lập trình DNA và lập trình gen;
- Bộ não và lập trình văn hóa;
- Tổ chức và quy trình quyết định chính thức;
- Hiện vật cơ học và điện tử cùng với thuật toán của nó;
- Tái lập trình phục vụ cho nhu cầu thích nghi và phát triển.
Trong phạm vi rộng hơn có thể chia ra làm 4 mức độ điều khiển như sau:
- DNA kiểm soát tế bào;
- Não kiểm soát cơ thể;
- Hệ thống xã hội kiểm soát quan liêu;
- Xã hội kiểm soát của hệ thống máy tính lớn.
Cùng với các mức độ kiểm soát này luôn tồn tại một số vấn đề về kiểm soát chung như sau:
- Duy trì một cấu trúc nội bộ (chống lại những rối loạn);
- Hoàn thành mục tiêu (mặc dù điều kiện luôn thay đổi);
- Loại bỏ những mục tiêu xấu và bảo vệ những mực tiêu tốt.
2. Hệ thống
Để hiểu rõ hơn về điều khiển học trước hết cần hiểu về hệ thống. Một hệ thống có thể được mô tả qua 3 chiếc hộp màu đen, màu xám và màu trắng. Những hành động có mục đích được thực hiện bởi những chiếc hộp chính là chức năng của nó. Trong mỗi hộp có những thành phần cấu trúc, các phần tĩnh điện và các thành phần vận hành. Những bộ phận này thực hiện quá trình xử lý các vấn đề, năng lượng hoặc thông tin.
Mỗi hộp này đều bao gồm những quá trình như nhập dữ liệu, chuyển đổi và sản xuất dữ liệu đầu ra. (sản phẩn có thể bao gồm 2 loại: sản phẩm hữu ích cho hệ thống cấp trên hoặc sản phẩm vô dụng). Một điều quan trọng cần chú ý là dữ liệu đầu vào của một hệ thống có thể là dữ liệu đầu ra của một hệ thống trực thuộc hệ thống đó.
Màu của từng hộp quyết định mức độ quan tâm khác nhau của người sử dụng đối với những thông tin về quá trình làm việc bên trong của một hệ thống. Hộp màu đen là một thứ gì đó nguyên thủy, không đưa ra bất kì gợi ý rõ ràng nào cho người quan sát về cách thức đạt được kết quả. Boulding (1956) đã viết: “một hệ thống là một chiếc hộp đen to mà chúng ta không thể mở khóa, tất cả những gì chúng ta có thể tìm ra là dữ liệu đầu vào và dữ liệu đầu ra”. Hộp màu xám chỉ cung cấp một phần thông tin về những quá trình chọn lọc nội bộ. Hộp màu trắng thể hiện một quan điểm hoàn toàn minh bạch, cung cấp toàn bộ thông tin về những quá trình diễn ra bên trong hệ thống. Điều này đòi hỏi toàn bộ thông tin phải hiếm hoặc là thông tin được mong đợi.
Tuy nhiên, khi cần có những thông tin hữu ích về toàn bộ quá trình chuyển đổi của hệ thống, 5 thành phần sau đây có thể được tính toán:
- Dữ liệu đầu vào: đây là những thang đo có thể thay đổi được quan sát để tác động tới hoạt động của hệ thống;
- Dữ liệu đầu ra: đây là những thang đo được quan sát có ảnh hưởng tới mối quan hệ giữa hệ thống và môi trường xung quanh;
- Chuỗi trạng thái: đây là những thang đo nội bộ của hệ thống xác định mối quan hệ giữa nguyên liệu và sản phẩm;
- Chức năng chuyển đổi trạng thái:chức năng này sẽ quyết định trạng thái thay đổi như thế nào khi có quá nhiều dữ liệu được đưa vào hệ thống;
- Chức năng của dữ liệu đầu ra: chức năng này cho biết sản phẩm của hệ thống với một dữ liệu đầu vào cho sẵn trong một trạng thái nhất định.
Các quy trình của hệ thống có thể tự điều chỉnh hoặc không chứ không có tình trạng vừa tự điều chỉnh vừa không tự điều chỉnh. Một hệ thống tự điều chỉnh được gọi là hệ thống khép kín và có sản phẩm đầu ra kết hợp với những nguyên liệu đầu vào. Trong một hệ thống không khép kín, sản phẩm đầu ra kết hợp với những nguyên liệu đầu vào. Trong một hệ thống không khép kín, sản phẩm đầu ra không được kết hợp với nguyên liệu đầu vào để đo lường.

Hình 1: Hệ thống không khép kín
Nguồn: Skyttner (2006, trang 80)
Trong một hệ thống phun nước, cảm biến nhiệt hoặc khói kích hoạt van nước mở ra để dập tắt vụ hỏa hoạn. Một khi được kích hoạt, hệ thống tiếp tục phun nước cho đến khi bình chứa hết nước hoặt bị tắt.
Cơ chế điều chỉnh của hệ thống khép kín bao gồm điều khiển hồi tiếp (feedback) và điều khiển tiếp tới (feedforward). Điều khiển tiếp tới là hành động kiểm soát mang tính chất tiên liệu nhằm mục đích tạo ra trạng thái mong muốn hoặc được dự đoán trong tương lai. Quá trình này sử dụng tín hiệu vào chứ không sử dụng tín hiệu ra như trạng thái hồi tiếp âm. Trong một hệ thống tiếp tới, hoạt động của hệ thống được thiết lập lại theo như một số mô hình kết nối nguyên liệu hiện tại với kết quả được dự đoán trong tương lai. Chính vì vậy, những thay đổi trạng thái hiện tại được quyết định bởi trạng thái được dự đoán trong tương lai được tính toán theo một số mô hình nội bộ trên thê giới.
Cơ chế điều khiển tiếp tới xảy ra trước một sự kiện và là một phần của một vòng lặp kế hoạch khi chuẩn bị cho các sự kiện trong tương lai. Nó cung cấp thông tin về những hành vi được dự đoán và mô phỏng quá trình xử lý thật sự. Chính vì vậy, cơ chế điều khiển tiếp tới là một cơ chế hướng đích. Mục tiêu này thực chất được xây dựng như một phần của mô hình giúp chuyển đổi giữa các trạng thái được dự đoán trong tương lai và những thay đổi trạng thái hiện tại. Một số ví dụ về hoạt động của cơ chế điều khiển tiếp tới có thể kể đến như: xây dựng ngân sách và xác định mục tiêu cho doanh nghiệp.
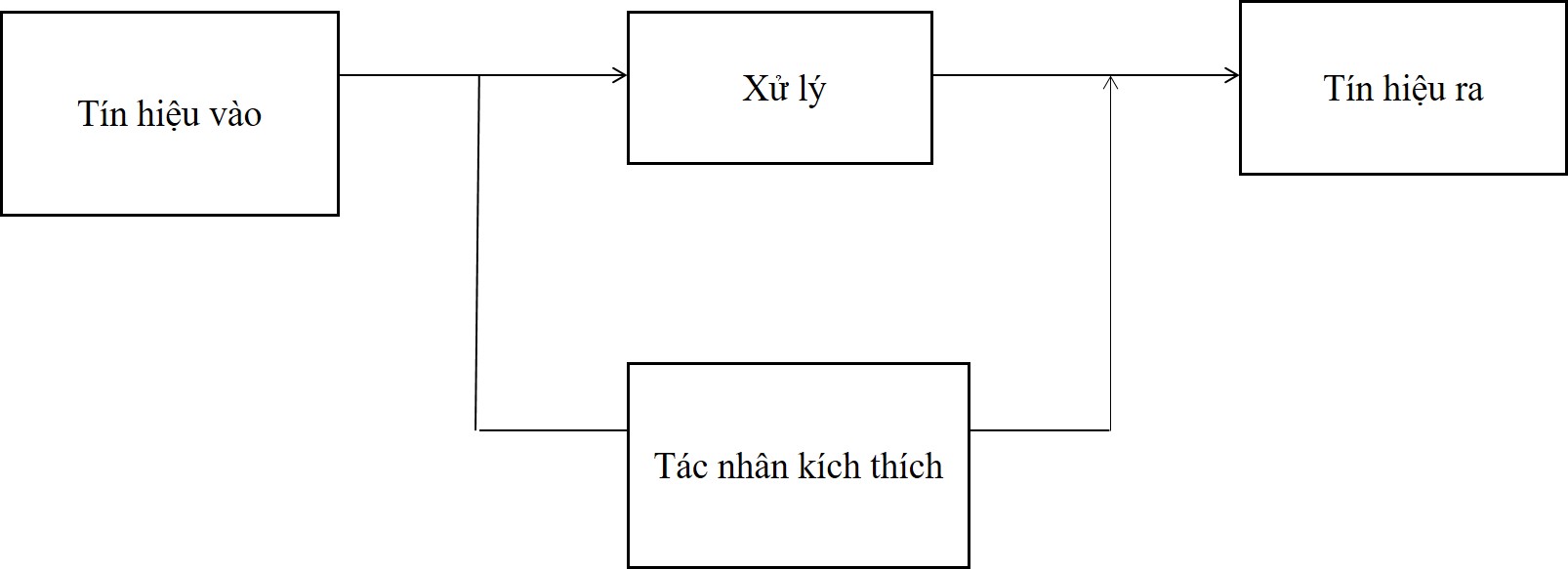
Hình 2: Cơ chế điều khiển tiếp tới trong hệ thống
Nguồn: Skyttner (2006, trang 81)
Hồi tiếp là chiến lược cơ bản cho phép một hệ thống khắc phục những gián đoạn không mong muốn. Việc này được tiến hành thông qua những vòng hồi tiếp duy trì các biến liên tục hoặc điều chỉnh chủng loại và số lượng thành phần tham gia. Nó thường được xác định như sự chuyển đổi từ một giai đoạn sau đó hay một giai đoạn trước đó. Thông tin liên quan tới kết quả của những hành động riêng vì vậy được cung cấp như một phần thông tin cho những hành động liên tục. Đóng vai trò một cơ chế điều khiển, nó hoạt động dựa trên nền tảng bản chất của nó thay vì hoạt động theo những gì được mong đợi, dự đoán. Bằng cách này, nó giúp sửa chữa các lỗi phát sinh trong quá trình hoạt động của hệ thống. hồi tiếp là một khái niệm quan trọng trong điều khiển. Khi hồi tiếp âm của một hệ thống biến mất, trạng thái ổn định của hệ thống cũng kiến mất. Dần dần, ranh giới cũng biến mất và sau một thời gian nó sẽ không còn tồn tại.
Một thiết bị hoạt động liên tục dựa trên nền tảng thông tin nhằm đặt được mục tiêu cụ thể qua những thay đổi được gọi là cơ chế trợ động (servomerchanism) . Đây là một ví dụ về việc sử dụng phản hồi tiêu cực. nó tối thiểu hóa cấu trúc bên trong bao gồm một cảm biến, một bộ phận kích thích và một đường dẫn kết nối. Cơ chế trợ động đơn giản là bộ điều chỉnh ly tâm của James Watt’s từ thế kỉ 18 và máy móc thiết bị bánh lái trên tàu hơi nước, thứ giúp thay đổi góc lái.
Hệ thống trợ động hoàn hảo sửa những lỗi sai trước khi chúng xảy ra. Nó giúp bôi trơn và điều phối các hoạt động phụ thuộc vào lượng phản hồi cần phải bù. Một cơ chế điều khiển cũng có thể đồng thời không liên tục. Một ví dụ là bộ điều nhiệt đơn giản chỉ có thể thực hiện 2 hành động: làm nóng lên hoặc không làm nóng. Dạng kiểm soát rời rạc này rất phổ biến trong tất cả các thiết bị điện tử.
Nếu hệ số nhân lớn hơn 1, thì tồn tại một trạng thái hồi tiếp dương. Trong cơ cấu điều chỉnh này, các tín hiệu đầu ra mới lớn hơn tín hiệu trước đó, tăng trưởng theo cấp số nhân và hiệu ứng khuếc đại lệch. Cơ chế của trạng thái hồi tiếp dương luôn là một phản ứng “chạy đi” và mang tính chất tạm thời. trạng thái hồi tiếp dương khuếc đại độ lệch chuẩn giống như một vòng tròn luẩn quẩn, trong khi đó trạng thái hồi tiếp âm chỉnh lại các sai lệch. điều này có thể dễ dàng quan sát qua các hiện tượng trong thực tế như sự tăng trưởng dân số, cuộc chay đua vũ trang quốc tế, lạm phát tài chính, lãi suất gộp của tài khoản trong ngân hàng. Vòng lặp tự tăng tốc của nó thường tạm ngừng trước khi quá trình bùng nổ và phá hủy hệ thống.
Các mức độ tìm kiếm mục tiêu khác nhau của một quá trình điều khiển hồi tiếp được đưa ra bởi Deutsch (1963). Mô hình phân cấp tìm kiếm mục tiêu này gần như tương tự với phân loại hành vi hệ thống của Ackoff (1971), cụ thể:
- Tìm kiếm mục tiêu bậc một: thể hiện sự hài lòng, thay đổi, sự tưởng thưởng ngay lập tức;
- Tìm kiếm mục tiêu bậc hai: đạt được cơ chế tự bảo vệ thông qua bảo vệ khả năng tìm kiến các mục tiêu bậc một bằng các điều khiển tương tự;
- Tìm kiếm mục tiêu bậc ba: Duy trì nhóm hoặc hệ thống cần thiết để điều khiển mục tiêu tìm kiếm bậc một và bậc hai ngoài vòng đời riêng;
- Tìm kiếm mục tiêu bậc bốn: Bảo vệ quy trình tìm kiếm mục tiêu được ưu tiên hơn so với duy trì bất cứ mục tiêu hoặc loại tìm kiếm nào trên đây. Đây thực tế là sự bảo vệ các mối quan hệ trong hệ sinh thái.
Đôi khi cũng cần phân biệt giữa hồi tiếp từ bên ngoài và hồi tiếp nội tại. Hồi tiếp từ bên ngoài tồn tại khi dữ liệu đầu ra vượt qua ranh giới và được biến đổi bởi môi trường trước khi quy trở lại hệ thống. Hồi tiếp nội tại diễn ra khi dữ liệu đầu ra được thay đổi bên trong ranh giới của hệ thống. Trong khi khái niệm về trạng thái hồi tiếp nói chung được hiểu là diễn ra từ bên trong thì hai khái niệm này ngang bằng nau từ quan điểm của hệ thống. Thông thường, hệ thống không phân biệt được các loại hồi tiếp trong thực tế.
Trong vòng tuần hoàn điều khiển, thời gian đóng vai trò quan trọng. Sự thay đổi trong tốc độ của vòng luân chuyển và ma sát giữa các thành phần của hệ thống có thể xảy ra. Những sự chậm trễ này chính là những thang đo điều chỉnh quan trọng giúp chống lại các khuynh hướng dao động vốn có của quá trình kiểm soát phản hồi. Chúng thường được áp dụng để đưa ra những giới hạn vật chất cụ thể cho hệ thống, làm chậm lại tác động.
Hệ thống điều khiển nói chung với năm bước điều khiển cơ bản hoạt động theo tiến trình như sau:
- Một trung tâm điều khiển giúp tạo nên những thang đo mục tiêu mong muống và công cụ để đạt được những mục tiêu đó.
- Những quyết định về mục tiêu được chuyển thành những tín hiệu đầu vào hành động, những tín hiệu này dẫn đến những tác động nhất định vào trạng thái của hệ thống và môi trường xung quanh nó.
- Thông tin về những tác động này được ghi lại và đưa phản hồi về cho trung tâm.
- Trung tâm điều khiển kiểm tra lại trạng thái mới này của hệ thống so với các thang đo mục tiêu mong muốn để đo lường những lỗi sai hay độ sai lệch của phản hồi đầu ra đầu tiên.
- Nếu những lỗi sai này làm cho hệ thống nằm ngoài những giới hạn được đặt ra bởi thang đo mục tiêu thì trung tâm điều khiển sẽ thực hiện hành động sửa chữa tín hiệu đầu ra.
Thành phần cơ bản đầu tiên của cơ chế điều khiển trong vòng tuần hoàn điều khiể cơ bản là bộ tiếp nhận (đôi khi được gọi là cảm biến hoặc máy dò), một dụng cụ đăng kí các kích thích khác nhau và sau khi chuyển đổi sang thông tin thì tiếp vận đơn vị điều khiển.
Khi so sánh giá trị của bộ tiếp nhận và các tiêu chuẩn cần thiết được lưu trữ trong bộ so sánh ta thấy rằng sự khác biệt cung cấp thông tin đính cính được thực hiện bởi bộ phận tác động. thông qua việc giám sát và hồi đáp lại bộ tiếp nhận, cơ chế tự điều khiển được hình thành. Hình dưới đây cho thấy cơ chế điều khiển xảy ra ở phía tín hiệu vào và cơ chế cảm biến được đặt ở bên tín hiệu đầu ra. ở những hệ thống phức tạp hơn với hồi tiếp bậc ba, bộ điều khiển có thể bao gồm cả bộ phần đạt mục tiêu với các tiêu chuẩn tham khảo, bộ lọc và có thể là bộ thiết kế để xây dựng các mục tiêu và quy luật đưa ra quyết định của hệ thống.
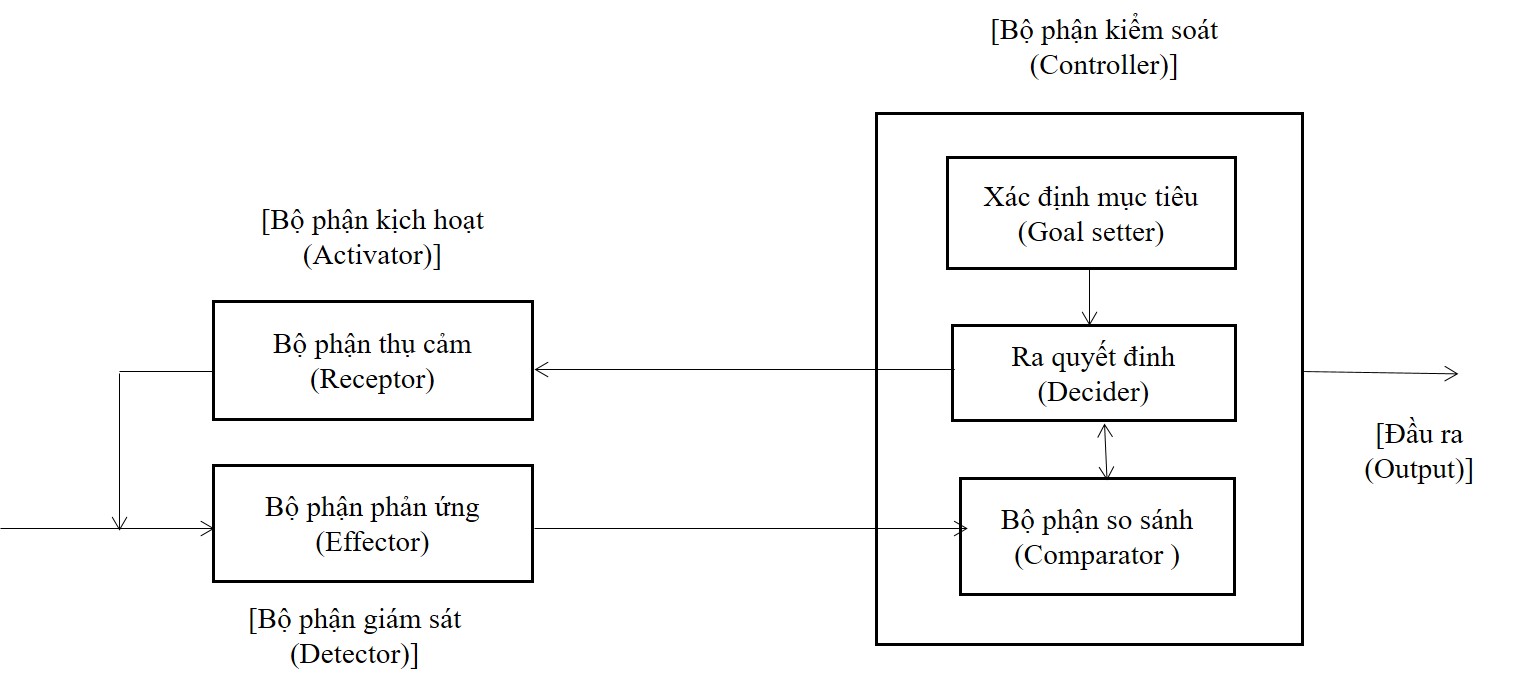
Hình 3: Hệ thống điều khiển tổng quát
Nguồn: Skyttner (2006, trang 91)
Hệ thống được kiểm soát phải có khả năng đọc được trạng thái của một biến quan trọng và xác định được liệu nó đang nằm trên nằm dưới hay nằm tại giá trị cho phép, việc này được thực hiện bởi bộ dò. Vì vậy, hệ thống thực hiện một số ưu tiên nhất định được sắp xếp bởi bộ lọc. Ngoài ra, hệ thống cũng cần tạo ra những phản hồi ưu tiên này trong trường hợp chúng không tồn tại. Việc này được tiến hành bởi các bộ phận kích hoạt và giám sát.
Cân bằng động lực học (dynamic equilibrium) là một cụm từ quan trọng khi định nghĩa những hệ thống sinh vật sống. Cụm từ này không có nghĩa là sự ổn định mà là một trạng thái trôi nổi được gậy ra bởi những chuyển động vô hình và sự chuẩn bị cho sự thay đổi. ở trạng thái cân bằng có nghĩa là đang thích nghi với những thay đổi để cân bằng. Cân bằng nội môi (Homeostasis) đại diện cho tất cả các chức năng điều khiển tạo ra trạng thái cân bằng động lực học trong một cơ thể sinh vật khỏe mạnh. Đó là khả năng của cơ thể để duy trì điều kiện bên trong của cơ thể nằm trong khoảng giới hạn khi môi trường thay đổi. Tuy nhiên, tất cả các hệ thống đều già đi và chết. Hiện tượng này được gọi là sự phân chia đều và là sự khởi nguồn của khái niệm ổn định phân chia đều (homeokinetic plateau).
Ổn định phân chia đều là một phần tự nhiên của vòng đời hệ thống. trong hệ thống của sinh vật. Đối với những hệ thống nhân tạo tiên tiến, vòng đời hệ thống có thể được chia ra thành những giai đoạn sau: hoạch định hệ thống, khảo sát hệ thống, thiết kế hệ thống, xây dựng hệ thống, đánh giá hệ thống, sử dụng hệ thống, và kết thúc vòng đời hệ thống.
Cuối cùng, một khái niệm đôi khi được sử dụng là điều khiển học bậc hai. Sự khác nhau giữa điều khiển học bậc một và điều khiển học bậc hai lần lượt dựa trên sự khác nhau giữa các quá trình của một chủ thể quan sát và một vật thể được quan sát. Một định nghĩa khác đó là sự khác nhau giữa sự tương tác của người quan sát và người được quan sát trong hệ thống tự động (bậc hai) và sự tương tác giữa các biến của một hệ thống được điều khiển (bậc một).
Nguồn: Phan Thanh Tú, Vũ Mạnh Chiến, Phạm Văn Kiệm, Lưu Đức Tuyến, Nguyễn Thị Hồng Nga (2018), Học Thuyết Doanh Nghiệp, NXB Lao Động – Xã Hội, trang 480-487.
14 Th11 2019
14 Th11 2019
14 Th11 2019
14 Th11 2019
14 Th11 2019
14 Th11 2019